脑机接口最新进展,脑机接口与运动假体
肢体运动是大脑与外界交互的主要方式,它一直是神经科学研究和脑机接口技术关注的重要领域。近20年来,通过解码相关神经活动逐步实现了对运动假体的实时控制,为神经系统功能的代偿和康复打开了一扇希望之窗。
作者|王天威崔翯
人的想象力总是先于现实,正如儒勒凡尔纳在作品中对20世纪科技的预言一样,当今科幻文学和影视作品对人的意识发生机械性的飞跃已经展开了大量的讨论,但在现实中,该技术的开发仍然主要是针对人体运动障碍的根据中国残疾人联盟2020年的统计数据,中国目前有近4000万残疾人,其中肢体残疾人占一半以上。 加上如此庞大的残疾人基数和日益严重的社会老龄化问题,神经假肢及相关辅助工具在运动康复中的应用具有极大的社会意义和商业价值。
神经假肢是指通过采集和解码神经信号驱动外效应器实现运动损伤补偿的技术,是脑机接口技术的主要应用领域之一。 神经假肢控制系统通常分为信号采集、信号处理和外围设备控制三部分。 目前通行的方法是通过核磁定位来定位移植的脑位点,再行开颅手术植入电极,采集皮质场电位或神经脉冲信号。 这些电信号经过滤波、降噪、分选等预处理后,通过传统的回归、分类算法或神经网络解码得到被测者的运动意图信息,产生运动指令驱动外部设备。
在神经科学研究、信号采集硬件和算法迭代快速的背景下,运动体模的发展即将开启新的篇章,充分利用神经科学研究大脑功能的成果,寻找合适的信号源和应用场景,在解码和自适应中结合人工智能算法,更加准确
基于神经表征的假肢控制
目前,神经科学的主流观点认为,大脑中不同的功能分区发挥不同的功能,它们编码的信息存在差异。 近几十年来对清醒猕猴的神经生理学研究,基本假设皮质神经活动与肢体运动参数(方向、速度、加速度、张力等)存在相应的映射关系,建立了表达模型,认为大脑是通过运动信息的表达和编码运算发挥作用的。 该特征以神经同步的形式反映于单个神经元,即单个神经元发出的电信号与某些变量相关。 支持这一观点的代表性成果是乔治波罗斯(A. P. Georgopoulos )等人于1982年发表的,他们训练猕猴完成平面上8个方向的推杆运动,同时获取运动皮质手臂运动代表区的神经元活动数据发现该发放率差异与运动方向的关系能很好地拟合余弦曲线,拟合余弦曲线
弦调制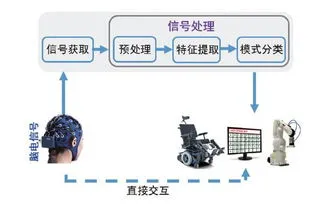
相关推荐
-

最新消息乒羽中心不承认张继科是运动员,网
最新消息乒羽中心不承认张继科是运动员,网友现在说几个意思?,刘国梁,娱乐版,网友,乒乓,大满贯,运动,比赛,商业,张继科,中心,消息资讯,景甜,刘国梁,乒乓,孔令辉,张继科,张继科怎么没有想到,连续数天,他的名字在娱乐版热度不减,一度占据娱乐榜首。关于张继科的这次“热搜”,全称说法是: “有关张继科因借钱欠债及传播女演员隐私视频的传闻”。最新消息是:张继科本人予以否认,挂断记者电话,详情不予解释,其代理律师表示:现阶段不便发声,若发声需和当事人商量。有句话叫 “...
-
如何打开手机地震预警系统,10秒打开手机
如何打开手机地震预警系统,10秒打开手机地震预警功能,功能,设置,安卓,搜索,安卓手机,如何打开,损失,开通服务,地震会给我们带来很多损失,但实际上一些损失是可以避免的。 通过手机提示,可以马上知道危险。 有时60秒前到30秒前的警告也能拯救生命。 我会告诉你打开手机的地震警报功能。在大多数安卓手机上,要在设置中找到安全,可以选择“紧急警报通知”或“SOS紧急联系”,在自然灾害警报中找到地震警报并打开即可。另外,部分安卓手机报警功能集成自带天气APP,需要通过天气...
-
乌克兰实际控制国土2020,克里米亚属于乌
乌克兰实际控制国土2020,克里米亚属于乌克兰,乌克兰,俄罗斯,美国,承诺,武器,经济,全民,控制,1954年苏联最高苏维埃主席团克里米亚属于乌克兰。苏联解体后,乌克兰继承了前苏联留在国内的大量核武器和战略武器。1994年2月5日,联合国常任理事国中国、美国、英国、法国和俄罗斯与乌克兰签署《布达佩斯安全保障备忘录》,宣布:一、承诺尊重乌克兰的独立、主权和现存边界2、承诺不对乌克兰使用武力或以武力威胁领土完整和政治独立3、承诺不通过经济压力使乌克兰屈从于他们的经济或...
-
这些症状或许是癌的征兆 出现癌症的早期
这些症状或许是癌的征兆 出现癌症的早期信号症状是什么样的,癌症,症状,肿块,疼痛,快速,体重,信号,发作,这些症状或许是癌的征兆 出现癌症的早期信号症状是什么样的?据消息显示,一般情况下,癌症早期的症状较轻且容易和其他疾病混淆,当身体快速消瘦、出现持续增长的肿块、不明原因的出血、反复发作的疼痛时可能暗示着已经得了癌症。1.快速消瘦:癌细胞会同人体的正常细胞争夺营养,在没有刻意控制体重的情况下,出现体重快速下降应警惕。2.出现持续增长的肿块:癌症的肿块一般活动性较差...
-
《亲爱的别担心》剧情与结局解释:一场以爱
《亲爱的别担心》剧情与结局解释:一场以爱为名的控制大秀,亲爱的,计划,法兰克,结局,剧情,杰克,艾莉丝,丈夫,工作,胜利社区,消息资讯,继初试啼声就大放异彩的处女作《高材生》,奥利维亚王尔德第二部作品《亲爱的别担心》挑战更大规格制作,且集结「二代黑寡妇」佛罗伦斯·珀、《永恒族》哈里·斯泰尔斯、《神奇女侠》克里斯·派恩等人。尽管《亲爱的别担心》未上映前,各种幕后八卦从不间断,但重心的确该放回《亲爱的别担心》电影上,毕竟佛罗伦斯·珀在接受访问时就表示不回应八卦的原因...
-
苹果手表怎么更新系统,Apple Watch Serie
苹果手表怎么更新系统,Apple Watch Series3将无法更新下个版本的新系统,更新,系统,版本,智能,苹果手表,连接,断开,设计,苹果智能手表在智能穿戴设备中一直是重要的存在。 因为苹果的智能可穿戴设备自问世以来一直反响巨大,受到很多人的欢迎。 从最初的Apple Watch到现在衍生了很多版本,以前就有人说苹果将在今年秋天发布新的Apple Watch Series。经过这么长的发展,苹果已经推出了很多代的Apple Watch。 在如此漫长的...
-
宁泽涛晒影子合照引发网友猜测,女友疑为游
宁泽涛晒影子合照引发网友猜测,女友疑为游泳运动员曹玥,图案,曹玥,女友,影子,网友,傅园慧,游泳,女生,宁泽涛,照片,八卦爆料,曹玥,网友,傅园慧,宁泽涛,林希妤,今天凌晨,宁泽涛在个人社交网络上晒出自己和一女生依偎的影子合照,并配文,海涛、四叶草、爱心和鱼的图案,疑似公开恋情。有细心的网友把宁泽涛的图案解读为“涛幸福爱上鱼”,所以纷纷猜测宁泽涛的女友名字中带有“鱼”的谐音。随后,网友们纷纷化身福尔摩斯,有网友说是高尔夫运动员林希妤,有网友还发现游泳运动员曹玥与...
-
高质量发展指标,“十四五”指标新变化释
高质量发展指标,“十四五”指标新变化释放高质量发展强信号,指标,民生,目标,经济,数字,绿色,比重,产业,新华社北京3月15日电(记者孙韶华班娟娟张莫)日前,“十二五”规划和到2035年的长远目标纲要全文公布。 共设全文19篇、65章,设定了未来5年经济社会发展20项主要指标,明确了包括102项重大工程项目在内的若干重大举措和重大部署。 专家表示,与五年规划相比,“十二五”规划纲要中许多重大指标的新变化,释放出未来更加注重高质量发展的强烈信号。翻开“十二五”纲要,...
-
竹联帮控制不了弘仁会,黑帮录:台湾黑道(5)竹
竹联帮控制不了弘仁会,黑帮录:台湾黑道(5)竹联帮,竹联,活动,世纪,事件,酒店,台北市,着手,绰号,忠堂:台湾广泛性黑社会组织竹联帮的直系堂口,竹联帮是最活跃的堂口之一,活动于北部,以台湾台北东区、台中为主要活动据点,总成员人数不详。20世纪80年代,竹联帮着手组织企业化,1982年陆续成立完成了第一批8个分堂。 忠堂就是其中之一,陈启礼的心腹董桂森担任堂主。 并把同为台中眷村子弟的刘焕荣、彭海忠等人迎进忠堂,声势浩大。 尤其是杀手刘焕荣枪杀几名黑道兄贵后,打响...
-
阿里回应大分拆:为何此时启动?谁会率先独
阿里回应大分拆:为何此时启动?谁会率先独立上市?如何继续控制?,业务,公司,阿里巴巴,上市,回购,市场,融资,股票,在官宣设立六大业务集团后,阿里哪些业务会率先独立上市?阿里高管再次回应。3月30日,在阿里电话会上,阿里巴巴集团董事会主席兼首席执行官表示,今天阿里每个业务性质不一样,发展阶段不一样,面对的客户、竞争市场都不一样,所以这次的组织变革必要性更强,难度也会更大。称,在成立六大业务集团和N家业务公司后,阿里巴巴将更好发挥控股股东作用,包括在初期阶段控制每家...
-
董卿跑步被拍,46岁素颜松垮还有黄斑,穿运动
董卿跑步被拍,46岁素颜松垮还有黄斑,穿运动装也装不了老少女!,董欣,显得,状态,感觉,皮肤,少女,董卿,年纪,黄斑,老态,八卦爆料,董欣,她作为主持人来说真的是非常的优秀的,而且真的是吸引了非常多人的注意呀,因为她的主持功底很好,而且说起话来就会让人感觉如痴如醉呢,腹有诗书气自华,很多人都喜欢用这句话来形容她,实在是太有文化了呀,毕竟她整个人就是那种非常的温柔大方的。只不过如今的董卿素颜状态下,其实也会有点显老态,看起来她现在也就不是那种少女了呀。董欣,跑步被...
-
普通话水平测试在线报名系统 全国国家普
普通话水平测试在线报名系统 全国国家普通话报名时间,普通话,系统,在线,选择,机构,缴费,显示,网站,一、普通话等级考试时间普通话等级考试是通过网上报名,各地考试时间不统一!在大城市,考普通话证书的需求往往特别大,所以当地的普通话考试会组织的非常频繁,最多的每月甚至每周就有一次考试。比如:湖北省的高校测试站华中科技大学的考试场次有这么多二、普通话考试报名入口获取普通话报名入口及各考点联系方式。(如下图)进入以上报名网址后第一步:选择所在省市第二步:点击“我要报名”...
-
为什么越是控制饮食越不瘦,放松几天,体重反
为什么越是控制饮食越不瘦,放松几天,体重反而下降了?,体重,水平,消耗,饮食,控制,缺口,身体,运动,因素,热量,经验教程,在减脂的过程中,为了保持一定的减脂效率,会建议大家定期测量体重以及身体围度来评估减脂的效果,然后以此为根据对自己的饮食与运动情况进行适当的调整,在这个过程中,我们会发现,即使所采取的方法有效,体重的下降速度也不会一直保持不变,而是会经历一个由快到慢然后停止的一个过程,为了阻止这种现象,我们的做法往往是进一步调整自己的饮食与运动计划,以期继续...
-
《小敏家》徐正的控制欲令人窒息,这不是爱
《小敏家》徐正的控制欲令人窒息,这不是爱,而是一种心理扭曲,素敏,原生家庭,控制,极端,外甥,徐正,爱情,敏家,钱峰,刘小捷,徐正对,徐正,王素敏,钱峰,刘小捷,《小敏家》播出了这么久,看到里面出现的cp真是一对比一对揪心,特别是徐正和刘小捷那令人窒息的爱情。徐正对刘小捷的爱几乎到了“丧心病狂”的地步,刘小捷参加聚会时,男闺蜜钱峰站在她旁边时,他顿时醋意大发,情绪当场崩溃。聚会结束后,他不顾性命地竟然猛踩油门去撞钱峰的车。更令人想不到的是,到最后为了验证孩子是不...
-
电影《镇魔司:灵源秘术》中控制与反控制的
电影《镇魔司:灵源秘术》中控制与反控制的隐喻,什么,情节,电影,控制,鲁班书,怪兽,陆隐,傀儡,种子,唐凌峰,观点评论,鲁班书,灵源,镇魔司,陆隐,唐凌峰,电影《镇魔司:灵源秘术》是由霍穗强执导,张亚奇、王寒阳、白昕怡、郭慕涵、周卓 等演员联袂演出的东方魔幻动作大片,片中出现了控制与反控制隐喻。镇魔司隐监部门的人都是戴罪之身,却各个身怀绝技。神树村的神树出现问题,变成了灵源巨树,吃掉很多人。隐监的唐凌峰带人克制灵源巨树,带火傀儡烧掉巨树,却不成想,公输家的公输祁...
-
黄晓明早起做各种健身运动,是不是做秀,看这
黄晓明早起做各种健身运动,是不是做秀,看这样东西就知道,成为了,网友,李浩菲,小伙伴,东西,健身,节目,肌肉,时候,黄晓明,八卦爆料,李浩菲,霸道,中餐厅,节目,黄晓明,去年,在湖南卫视《中餐厅》第三季中,"霸道总裁"黄晓明可以说是被网友说惨了,甚至连之前的人设都遭遇崩塌。在节目之中,黄晓明将自己的"霸道"之风展现到了极致,无论是前台、还是后厨,看到黄晓明都会非常紧张,而他的那些"明言明语"更是全部都来源如此。从那儿之后,"黄晓明"这个名字,也成为了"霸道"的一...